
Monclova, Coahuila.- La Dra. Isela Guadalupe Carrera Calderón y el Dr. Héctor Alonso Moreno Ávalos, catedráticos investigadores de la Facultad de Ingeniería Mecánica y Eléctrica (FIME) Unidad Norte (UN) de la Universidad Autónoma de Coahuila, diseñan y construyen nuevas arquitecturas de robots de campo, de servicio y rehabilitación.
Sus investigaciones incluyen el desarrollo de nuevos sistemas de locomoción para robots móviles terrestres, robots para asistir en la rehabilitación de personas, y el empleo de inteligencia artificial para controlar estos dispositivos; uno de los campos en los que trabajan actualmente es la robótica transformable para tener diferentes modos de operación y realizar diversas tareas de manera más efectiva.
Ejemplo de lo anterior, es el diseño de ruedas con extremidades de geometría variable, las cuales permiten tener la eficiencia y eficacia mecánica de ruedas circulares para transitar terrenos planos, así como ruedas ajustables para atravesar la arena, la graba, el lodo o la nieve.

Para evaluar experimentalmente estos diseños de ruedas desarrollaron el robot Leonardo-MTP, el cual tiene cuatro actuadores, dos que se emplean para la transformación de las ruedas y los otros dos para controlar el movimiento del robot mediante dirección diferencial; las aplicaciones de esta clase de robots con ruedas transformables podrían ser en la entrega automatizada de productos.
Otro de los robots desarrollados es el Papalotl, un robot para la rehabilitación del levantado y de la marcha, que se construyó con el objetivo de ayudar a personas a rehabilitar el movimiento de sedestación a la bipedestación, es decir ayuda a realizar el correcto movimiento de la posición de sentado a la posición de pie y luego continuar con la marcha.
En este proyecto bajo la coordinación de los investigadores participaron diversos estudiantes, entre ellos Isidro Hernández, alumno de la maestría en Ciencias en Metal Mecánica, y Dinorah Rivera y Kevin Villastrigo, estudiantes de la carrera en Ingeniería Biomédica de la FIME UN.
El robot Papalotl tiene ruedas delanteras actuadas por servomotores eléctricos que permiten al usuario marchar junto con el robot, el cual posee un asiento para apoyar el cuerpo del paciente, así como un respaldo automatizado para el adecuado movimiento del tronco, fundamental para la rehabilitación motriz.

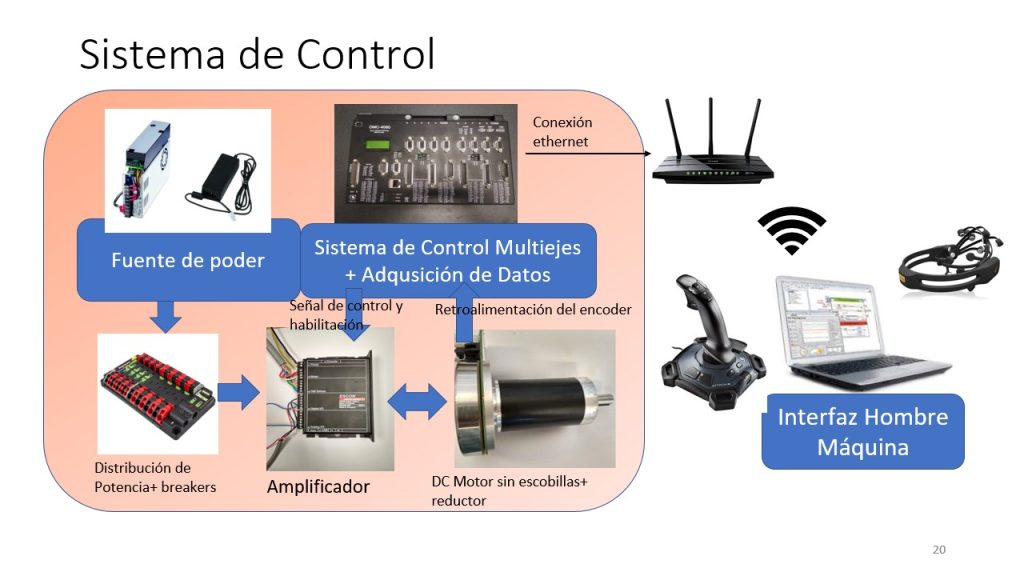
Para monitorear el movimiento del robot de rehabilitación, desarrollaron un chaleco con diversos sensores para determinar la postura; el diseño de este chaleco es para niños entre 8 a 12 años e incluye un acelerómetro que permite la medición e intención del movimiento del tronco; la tarjeta controladora del robot es una tarjeta multiejes Galil que fue programada en LabVIEW.
Otro de sus proyectos es el robot cuadrúpedo Coyote.01, el cual se realizó en coordinación con el alumno de intercambio Oswal Vera de la Universidad de Pamplona de Colombia, este robot tiene como propósito servir de plataforma experimental para el desarrollo e implementación de algoritmos de marcha y navegación de robots cuadrúpedos.
El robot posee cuatro piernas con tres grados de libertad cada una, la tibia y el fémur se controlan mediante un mecanismo paralelo 2RR; el robot cuenta con 12 actuadores Dynamixel XM430-W210-T, estos motores que pueden medir y realizar control de posición, velocidad y fuerza, el objetivo de este proyecto fue desarrollar una plataforma experimental de altas prestaciones, pero de bajo costo.
Los doctores Isela Carrera y Héctor Moreno, informaron que los planes a futuro del robot de rehabilitación es el desarrollo de un protocolo de experimentación con pacientes y buscar la colaboración científica con alguna institución dedicada a la rehabilitación física de pacientes.
Estos experimentos requerirán el empleo de diversos sensores para medir la actividad muscular y neuronal a través del desarrollo de software para la integración de sensores mioeléctricos y una diadema para medición de actividad electroencefalográfica, para encontrar una correlación entre bioseñales con las diversas sesiones de terapia que se pueden realizar con el robot.
Agregaron que, con respecto al proyecto de ruedas transformables, la investigación futura es el diseño óptimo de estos mecanismos basado en los modelados matemáticos (cinemáticos y dinámicos), empleando algoritmos genéticos como métodos de búsqueda para un mejor desempeño mecánico.

Por otra parte, se continuará con la generación de nuevas arquitecturas mecánicas de ruedas transformables, el modelado matemático, simulación y el estudio de las mismas, posteriormente la evaluación experimental para identificar aquellos que provean de mayores ventajas en el desempeño, robustez y consumo de energía.
Señalaron que se pretende buscar colaboraciones con instituciones que requieran un sistema de movilidad con estos atributos para realizar misiones de exploración en ambientes difíciles de acceder o atravesar, por ejemplo, en las áreas geológica, arqueológica o cualquier otra investigación de carácter científico.
La Dra. Isela Carrera tiene una trayectoria como ingeniera en diversas compañías, es especialista en el control de actuadores y desarrollo de hardware para sistemas mecatrónicos, es ingeniera en electrónica y comunicaciones por el Tecnológico de Monterrey y su tema de investigación actual es la robótica de rehabilitación.

El Dr. Héctor Moreno ha sido profesor en diversas universidades de México y Latinoamérica, es un experto en mecánica de robots, cuyo principal tema de investigación es diseño de mecanismos robóticos transformables, curso sus estudios de ingeniería y maestría en el Instituto Tecnológico de la Laguna.
Ambos realizaron su doctorado en la Universidad Politécnica de Madrid y son actualmente Investigadores del Consejo Nacional de Humanidades Ciencia y Tecnologías CONAHCYT; participaron en el desarrollo del primer robot caminante bípedo de escala natural realizado en México, bajo la supervisión del Dr. Alfonso Pámanes y el Dr. Víctor Santibáñez en el Tecnológico de la Laguna y han trabajado en diversos proyectos de investigación y desarrollo tecnológico en robótica industrial, de campo y de servicios. (EL HERALDO)



{kind=link}